Featured Work
My research lives at the intersection of tactile intelligence, embedded AI, and assistive robotics — building physical systems that perceive, reason, and act in the messy real world.
All Projects
GenTact: Multimodal 3D-Printed Robot Skin Toolbox
Collaborating on GenTact — a modular toolbox for 3D-printed compliant robot skins integrating multimodal sensing (ToF, capacitive, magnetic, EIF). Targeting Science Robotics.
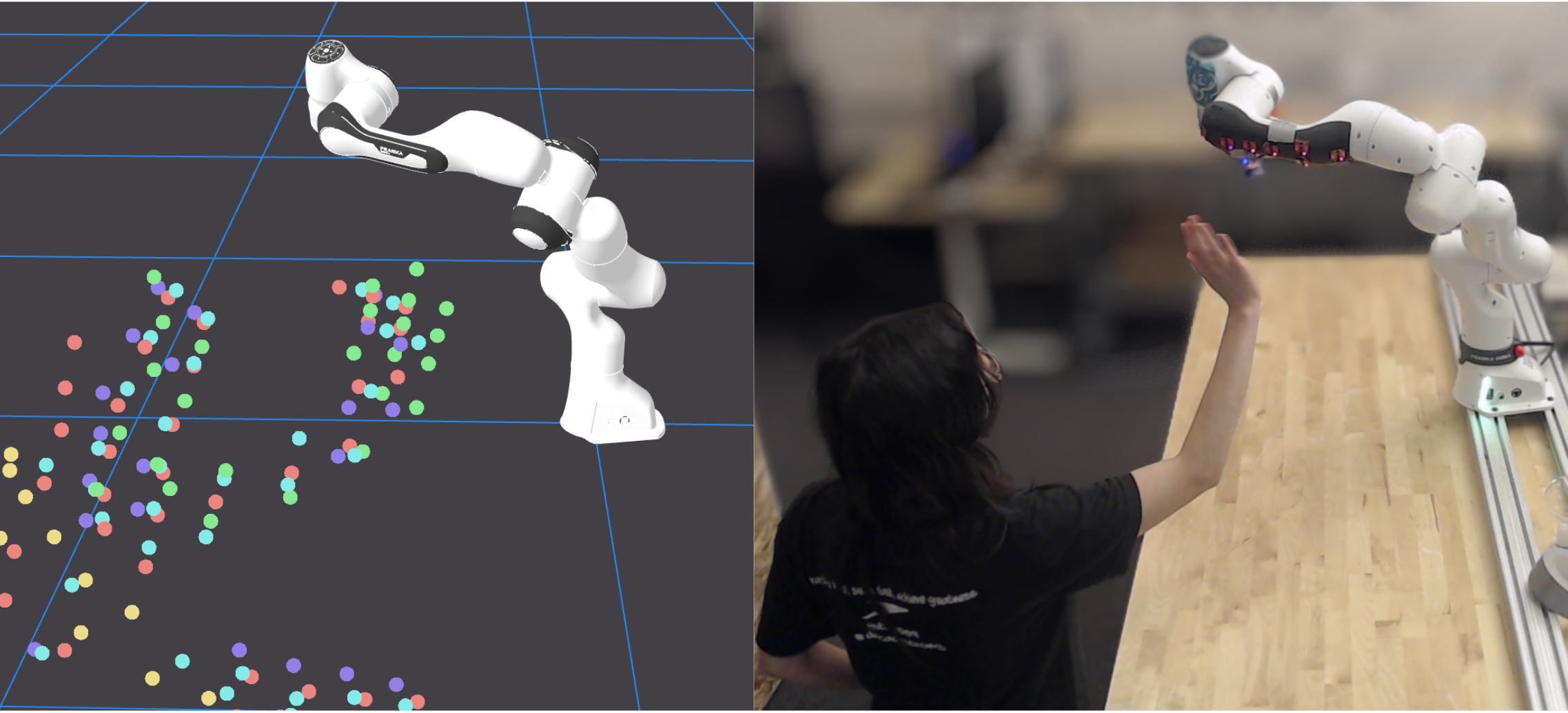
View Details →NurseBot: Gentle Assistive Grasping Robot
Collaborating with Pam Qian (University of Houston) on an NIH proposal for a soft, tactile-enabled nurse robot. Focuses on safe, compliant grasping and human-robot interaction for clinical care.
NIH Proposal (In Development)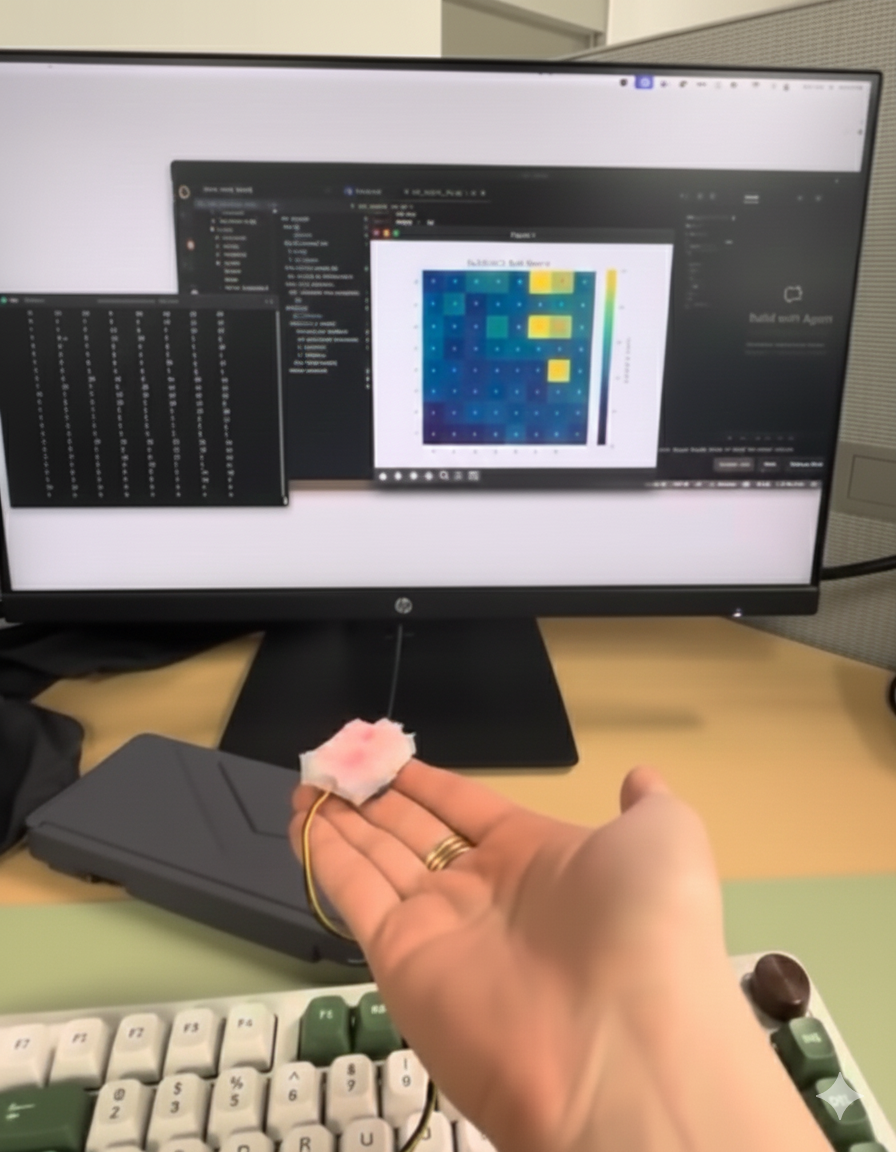
TouchIQ: Low-Cost Dual-Modality Tactile Sensor
Developing a cheap, high-resolution dual-modality sensor that combines rich tactile sensing with proximity detection. Designed to be mounted on the Unitree H1 Inspire hand, enabling safer and more dexterous manipulation through contact force and pre-contact awareness.
In Progress · Targeting ICRA 2026
XLeRobot-Pro: Mobile Bimanual Manipulation Platform
An untethered, low-cost bimanual mobile manipulator featuring a custom Tri-Bus power topology and structurally optimized chassis to support GPU-accelerated edge compute — enabling fully autonomous policy execution without external servers.
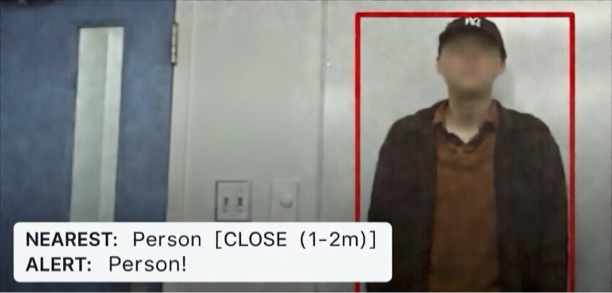
EchoVision: Real-Time Assistive Navigation
A hybrid NPU–CPU inference pipeline deploying EfficientViT-SAM and YOLO on embedded hardware for real-time scene segmentation and obstacle detection. Designed to run entirely on-device for assistive navigation — no cloud dependency, targeting low-power wearable platforms.

Medtronic Surgical Teleoperated Arm
Collaboration with Medtronic
Engineered a high-precision 6-DOF teleoperation pipeline for robotic assisted surgery (RAS) proof of concept. Implemented closed-loop PID control and computer vision tracking to achieve sub-millimeter trajectory accuracy.
Proprietary
Pediatric Health Sensor
Collaboration with Children's Hospital Colorado & InsCy Lab
Developing a proprietary solid-state transduction architecture for pediatric pulmonary testing. Utilizes novel, non-contact sensing to achieve clinical-grade flow quantification without mechanical calibration.
Proprietary / Patent Pending